Introduction
Any fan of the NFL can appreciate the beauty of a perfect spiral pass. We've seen it time and time again: a quarterback steps forward, cocks the ball back, and launches a deep pass off their fingertips. The ball points upwards immediately after release, but as the ball sails through the air, the nose gradually dips downwards before landing right in the hands of the receiver.



The longitudinal axis of the football remains tangent to the football's velocity throughout its flight, a quirk that football fans and players often take for granted. It makes sense that the angle of the ball would follow its trajectory to reduce drag. However, there's just one problem. The law of conservation of angular momentum in physics states that the angular momentum of an object remains constant when no net external torque acts upon it. In other words, the longitudinal axis of a spinning object maintains its orientation unless torque causes it to move. Torque is a measure of the force that causes an object to rotate. Think of a door: when you push a door open, you apply torque by rotating it around its hinges.
Conservation of angular momentum is made evident by the example of a spinning top. A spinning top continues to spin because its angular momentum points up and remains constant due to the lack of external torque affecting the top's rotation. It's important to note that the force of gravity does not cause torque, because it's applied to the center of the top and doesn't affect its rotation. Over time, though, the dissipative force of friction causes enough external torque for the top to become unbalanced and topple.
In the case of a spiraling football, there's no friction to cause torque on the ball. Gravity again acts equally on all parts of the ball, so it doesn't cause torque either. Therefore, the nose of the ball should point upwards throughout its entire arc by conservation of angular momentum. So why does it dip?
Air Resistance
If neither gravity nor friction can explain this phenomenon, there's only one possibility left: air resistance. In physics class, the effect of air resistance is often so negligible that we completely ignore it. But could it be what causes a spiraling football to orient itself with its trajectory?
When you envision a spiral, it seems as if air resistance would have the exact opposite effect: the air would push against the nose of the ball and rotate it backwards against its trajectory. We must employ a more careful mathematical approach to determine exactly how air resistance causes a perfect spiral to maintain tangency with its trajectory.
Setup
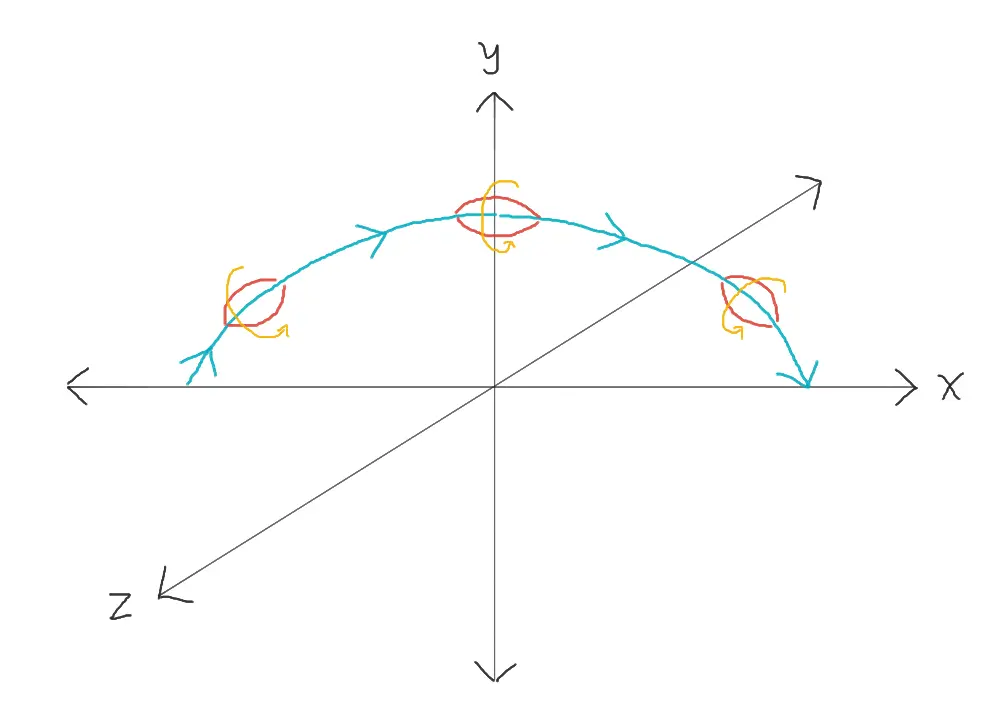
We will represent the flight of a spiral pass in space such that the football's trajectory begins on the negative axis, intersects the positive axis, and ends on the positive axis, as shown in #fig-geometry. The axis is perpendicular to the plane of the page.
We must consider the ball's velocity and the direction of its longitudinal axis. The spiral of the ball itself is also a factor in its flight, so we will consider the ball's angular momentum
Given that the ball is thrown straight, and are both vectors in the plane. To determine the direction of we use the formula
where represents the position of a point on the object relative to the center of mass, and represents the linear momentum at that point. For a right-handed quarterback, the ball spirals clockwise, so we can determine using the right-hand rule that also points along the plane in the direction of
Because is perpendicular to and is perpendicular to in the plane, we can conclude that is colinear with which means that the angle between them is Therefore, we can set
where is the magnitude of
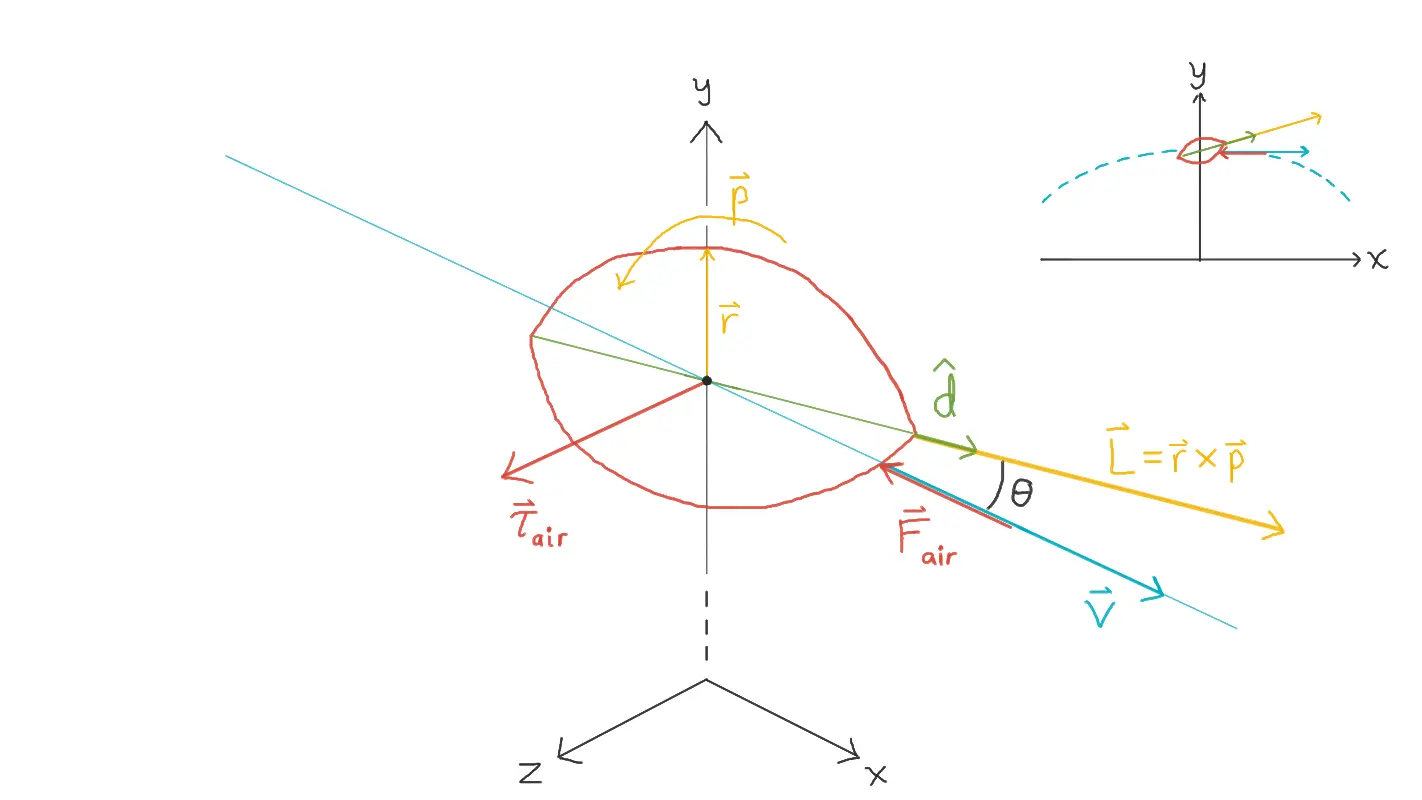
In a truly "perfect" spiral, would also be colinear with and ; however, this is not realistic. As shown in #fig-vectors, may not be aligned with This is the key to our problem. If you watch slow-motion video of deep balls, you will notice that every pass wobbles, even if only just a tiny bit. Not even Tom Brady can throw a perfectly tight spiral that doesn't wobble!
Why is wobble important? The force due to air resistance is given by
where is the density of air, is the cross-sectional area of the object, and is the drag coefficient of the object. #eq-drag tells us that and are colinear and opposite. Without wobble, and would then also be colinear and opposite, so should cause no torque on the ball. Indeed, we can prove this using the definition of torque
In our case, where is the length from the football's center of mass to its nose, and Therefore,
where is the angle between and and
Note that points in the direction of the cross product of and As shown in #fig-vectors, initially points in the positive direction due to the right-hand rule. From #eq-air-torque-1 it is easy to tell that when or when there is no wobble.
When the ball does wobble, the direction of deviates from the direction of so and The issue, however, is that when when it should, in theory, equal because would occur at the base of the ball perpendicular to Imagine a football falling straight down with its longitudinal axis parallel to the ground; air resistance would have no effect on the ball's tilt. To resolve this, we simply halve the period of giving
Now, at as desired.
The angle of wobble in a well-thrown spiral is small, so we can apply the small-angle approximation to #eq-air-torque-2 to produce a final equation
Because we are primarily concerned with the behavior of in relation to we assume that follows a fixed parabolic path per the rules of projectile motion and is not affected by air resistance, allowing us to focus solely on and its effect.
Visualization
Before we conduct any calculations, we should first try to predict intuitively how the torque due to air resistance will affect the ball.
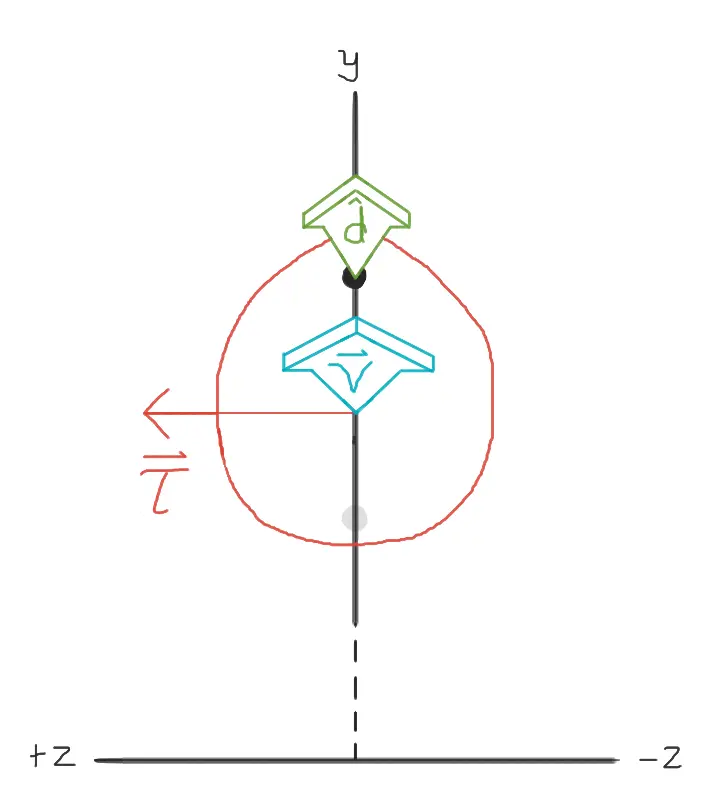
At the time the ball is released from the quarterback's hand, and are aligned. Immediately after launch, the force of gravity would cause to tilt downwards, which separates it from and causes a torque in the direction as shown in #fig-precession(a).
By the rotational equivalent of Newton's second law (we will use Newton's over-dot notation to denote a time derivative),
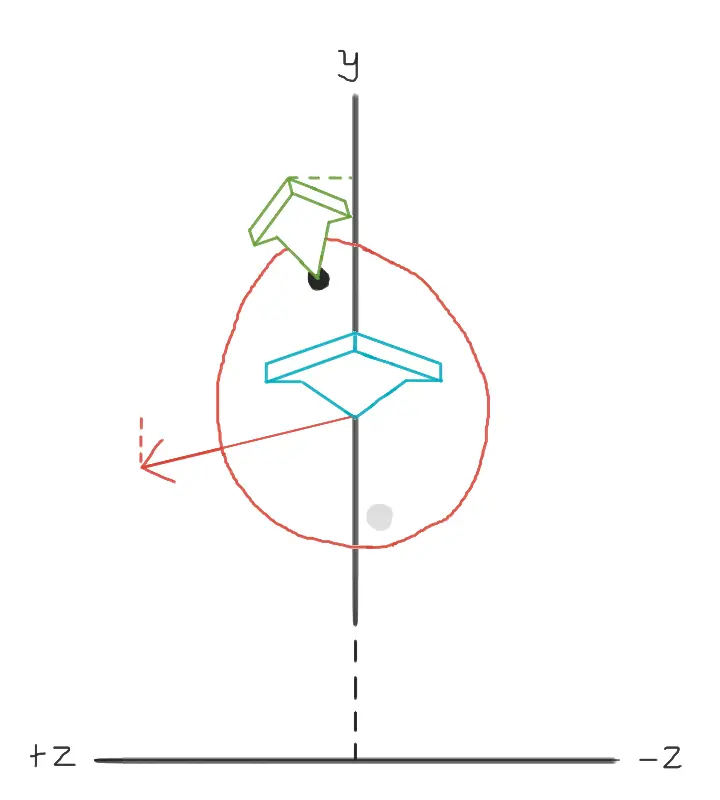
Therefore, the torque causes a change in the ball's angular momentum in the direction. #eq-L tells us that is aligned with so is also transformed in the direction. In other words, the nose tilts to the right from the quarterback's point of view, or to the left from the receiver's point of view as shown in #fig-precession(b).
Let's quickly define a couple of terms commonly used in the field of aerospace to make this explanation easier. Yaw is the rotation of the football about its axis that changes the direction it is pointing to the left or right of its direction of velocity. Pitch is the rotation of the football about its axis that raises or lowers its nose. As such, the torque in the direction causes the ball to "yaw right".
Because now has a component in the the direction, the torque develops a component in the direction by the right-hand rule, as shown in #fig-precession(b). Consequently, the ball pitches downwards, creating a component of torque in the direction again by the right-hand rule, as shown in #fig-precession(c). This new torque will alter the ball's yaw, which will alter the torque, which will alter the ball's pitch, and so on. This cycle of interaction between torque and is analogous to the relationship between velocity and centripetal acceleration, so we can infer that , and equivalently the nose of the football, moves in an approximately circular path within the plane. Indeed, this is a common behavior in spinning objects known as gyroscopic precession.
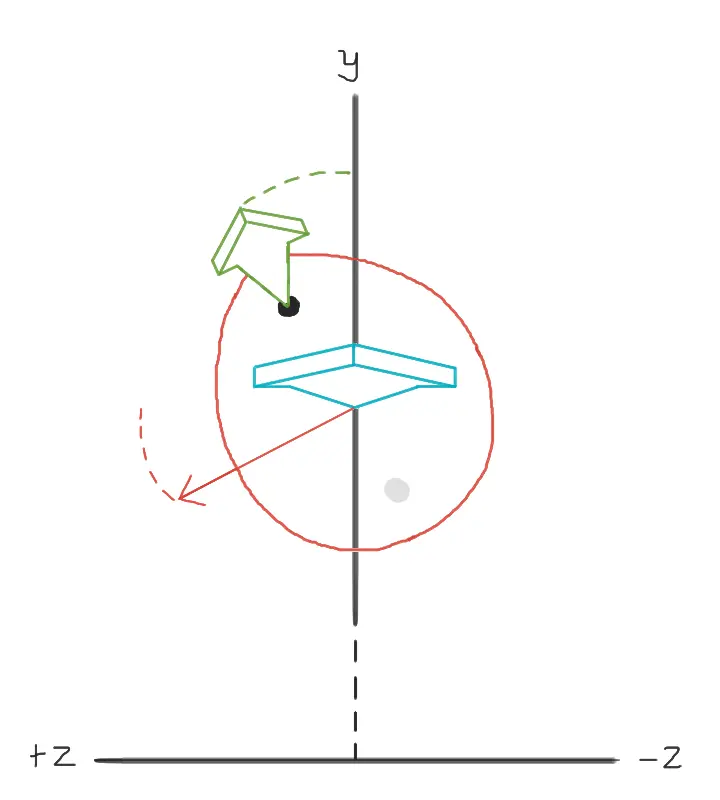
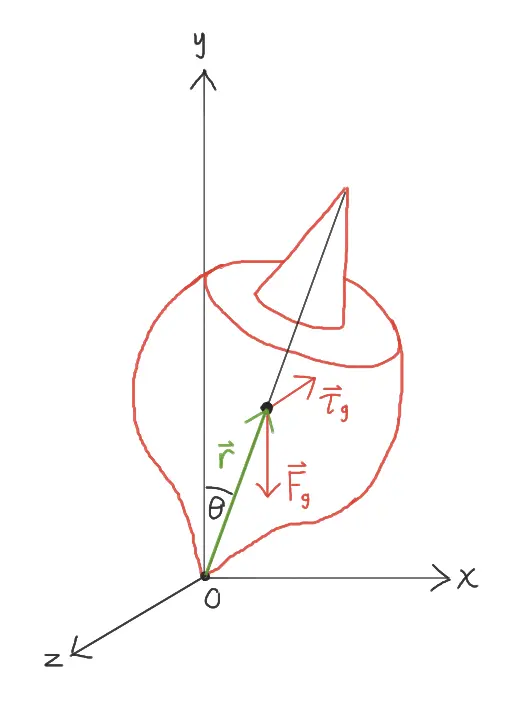
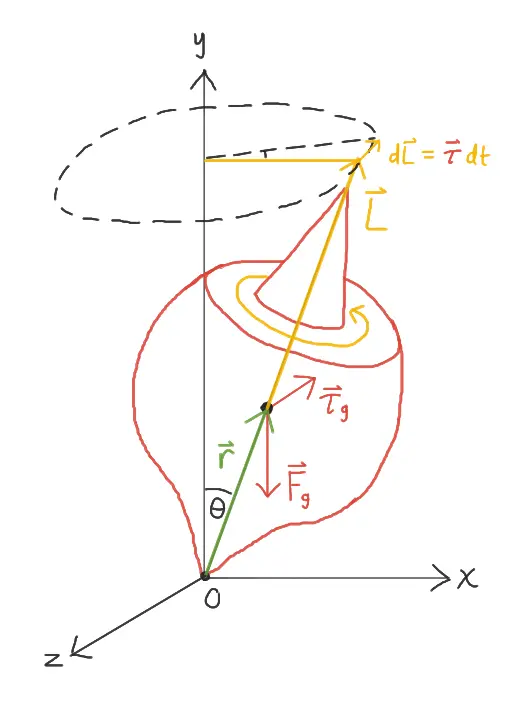
A gyroscope is a spinning object, such as a top, whose axis of rotation is free to assume any orientation. Precession is a change in the orientation of the axis of rotation. Gyroscopic precession describes how a gyroscope precesses, which we can imagine using the example of a top. If you place a top at an angle on a flat surface without spinning it, it will fall over due to the torque caused by gravity, as shown in #fig-top(a). If the top is spinning, however, it will have an angular momentum pointing upwards in the axis of rotation, as shown in #fig-top(b). The torque will then cause a change in according to #eq-second-law. Because the torque is always horizontal and perpendicular to , the top precesses about the axis, and the tip follows the circular dotted path. In the case of a spiral pass, the torque is always perpendicular to , so the nose precesses about some axis.
Gyroscopic precession explains how torque due to air resistance can affect the pitch of a spiraling football.
#fig-precession also illustrates how slowly rotates downwards due to gravity throughout this flight. Knowing that maintains general tangency with the trajectory of the ball, we can predict that the ball precesses relative to rather than some fixed point. Now, we must do the math to determine the exact nature in which the nose moves.
Calculations
We start by trying to find the rate at which the ball gyroscopically precesses. From #eq-air-torque-3, . Substituting into #eq-second-law and multiplying by gives us
The radius of the dotted circle in #fig-top(b) is , which simplifies to by the small-angle approximation. Thus, the angle that the ball precesses through in time is
The angular velocity of precession would be , so we divide by to finish with
We can now use #eq-omega to model the movement of over time. Substituting #eq-air-torque-3 into #eq-second-law,
from #eq-L so we substitute into the left-hand side to get
We keep outside of the derivative because we know from the previous section that precession does not change the magnitude of , only its direction. This allows us to divide both sides by , so #eq-L-dot becomes
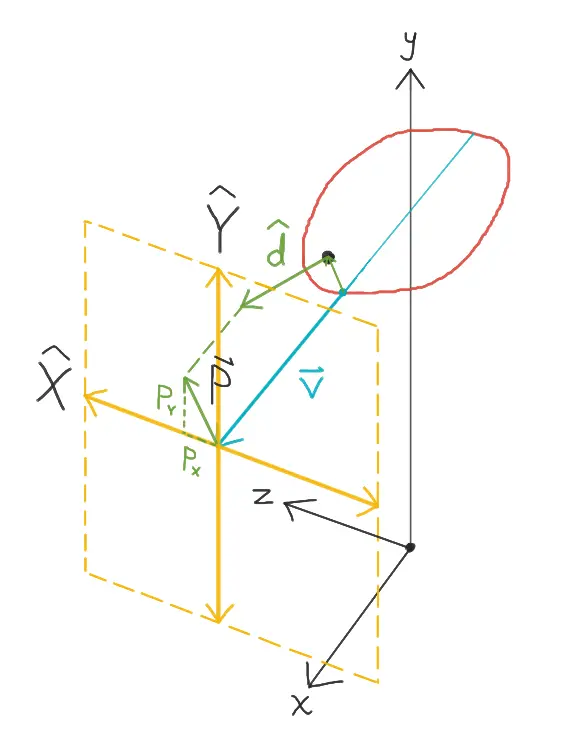
Still, we are concerned not with how behaves by itself, but with how behaves relative to . To obtain insight into the manner in which deviates from , we consider the projection of onto a plane perpendicular to . This plane shall be specified by the coordinate system defined by , as illustrated in #fig-projection. Thus, we define as
where we can think of as the ball's yaw and as the ball's pitch.
To determine , we must calculate the magnitude of the vector projection of onto :
And to determine , we calculate the magnitude of the vector projection of onto :
We ultimately want expressions for and in terms of just and other constants such that we can graph our results. To do so, we first expand #eq-d-dot, resulting in
Next, we take the derivative of #eq-P-X with respect to time, which yields
Substituting the appropriate component of that we found in #eq-d-dot-expanded,
The process of finding begins in the same manner. We differentiate #eq-P-Y with respect to time and get
Substituting the appropriate component of that we found in #eq-d-dot-expanded,
This one's not so simple. However, we can use the fact that the football moves in a parabolic path, as illustrated in #fig-geometry, to our advantage.
If we make the assumption that follows a semicircular trajectory, then we can define using the parametric unit circle equations
where is the constant angular velocity of in the plane. The path of the football under gravity is certainly more complex, but these equations shall suffice.
Our model allows us to greatly simplify #eq-P-Y-dot-1. We take the time derivatives of #eqs-v-hat and substitute for their respective components of , giving
When the ball is thrown at , and are co-linear. Thus, the expression in parenthesis becomes
We now combine #eq-P-Y-dot-2 with #eq-d-dot-v and #eq-P-Y to obtain
#eq-P-X-dot and #eq-P-Y-dot-3 form a system of first-order differential equations which we can write as
where and because and are initially aligned.
To solve #eq-P-system we first consider the corresponding homogeneous system
We solve #eq-P-system-homo by assuming that solutions take the form
where the exponent and the vector are to be determined. Substituting into #eq-P-system-homo gives
which we can reduce to
This leads us to the system of algebraic equations
#eq-eigensystem has a nontrivial solution () if and only if the determinant of coefficients is , or equivalently, when
The solutions, or eigenvalues, of #eq-characteristic are and . In the case of , #eq-eigensystem becomes
so the corresponding eigenvector
In the case of , #eq-eigensystem becomes
so the corresponding eigenvector
Hence a fundamental set of solutions to the system described by #eq-P-system-homo is
However, we want a set of real-valued solutions that we can graph. To obtain these, we choose either or and separate it into its real and imaginary parts. Proceeding with the former,
It is easy to prove that the real and imaginary parts of any form a set of solutions of #eq-P-system-homo. We simply substitute for , obtaining
It follows that and , so both and are solutions of #eq-P-system-homo.
Returning to , we can now conclude from #eq-P-separated that a set of real-valued solutions of #eq-P-system-homo is
We now turn back to the nonhomogeneous system described by #eq-P-system and seek a particular solution. We will employ the method of undetermined coefficients, in which we assume the form of the solution with the coefficients unspecified, and then look to determine them so as to satisfy the system.
Because in #eq-P-system is a constant vector, we guess that the particular solution is a constant vector . Making the substitution yields
Combining #eqs-P-system-homo-sols and #eq-particular gives us the general solution to #eq-P-system
Our final step is to solve for and with respect to the initial condition . At , #eq-P-system-general-sol becomes
so and . Thus, the particular solution to #eq-P-system is
which means that
Success! #eqs-P-system-particular-sols are in terms of only and physical constants, so we can graph them and see how a tight spiral pass yaws and pitches over time.
Resolution
In order to visualize our equations, we must decide upon values for and . To this end, we turn to wind-tunnel aerodynamic tests of the motion of a football conducted by William J. Rae (Rae), in which he determined that for a spiral pass with a launch angle of and a launch speed of m/s,
Plugging these values into #eqs-P-system-particular-sols and graphing both equations against produces #fig-P-vs-time.

Note that the pitch of the football follows a sine wave, so it periodically intersects . This is the resolution to our paradox! Because the ball always returns to zero pitch relative to its velocity, it appears to the viewer as if the orientation of the ball's longitudinal axis follows its trajectory. Thus, when the football descends, we see its nose dip as its pitch compensates for its downward velocity.
We can visualize this behavior in perhaps a more intuitive manner by graphing and parametrically, which yields #fig-P-parametric.

#fig-P-parametric can be thought of as showing the yaw and pitch of the ball from the perspective of the quarterback, as opposed to #fig-projection, which shows from roughly the perspective of the receiver. starts at , but proceeds clockwise following a circular path throughout the ball's flight. This confirms our theory that the ball gyroscopically precesses; in our case, the nose of the spiral is akin to the tip of the top in #fig-top-2.
Furthermore, #fig-precession introduces the idea that the greater is in the direction, the stronger the torque on the ball in the direction. #fig-P-parametric reflects this idea in that the greater is in the direction, the faster decreases in the direction due to torque, creating the clockwise path shown. It follows that because is always positive, the torque on the ball is often in the direction, allowing the ball's longitudinal axis to keep up with its velocity's downward rotation.
In simplest terms, the angle of a spiraling football follows its trajectory because regularly returns to .
Conclusion
Without gravity, the so-called paradox described in this article would not exist. Even when taking gravity and air resistance into account, a physicist who has never watch football would probably not predict that a spiral pass would maintain tangency with its trajectory. Physics, however, is often counterintuitive.
By causing the ball's velocity to dip, gravity sets off a chain reaction in which air resistance causes a torque on the ball, which causes the ball's angular momentum to rotate, which causes the ball to wobble, which causes the ball's longitudinal axis to dip with its velocity, creating an easier pass for the receiver. So next time you see a deep spiral touchdown pass on TV, try to spot the wobble in the slow motion replay. Without that wobble, those 6 points may not be on the board.
References
11.4 Precession of a Gyroscope | University Physics Volume 1. (n.d.). In Lumen Learning. Retrieved June 9, 2021, from https://courses.lumenlearning.com/suny-osuniversityphysics/chapter/11-3-precession-of-a-gyroscope/
Boyce, W. E., & DiPrima, R. C. (2012). Systems of First Order Linear Equations. In Elementary Differential Equations and Boundary Value Problems (10th ed., pp. 359–449). Wiley Global Education US.
Hard Knocks: Baker Slow Motion Practice. (n.d.). Retrieved June 9, 2021, from https://www.facebook.com/HardKnocksHBO/videos/hard-knocks-baker-slow-motion-practice/1891113581007661/
Price, R. H., Moss, W. C., & Gay, T. J. (2020). The paradox of the tight spiral pass in American football: A simple resolution. American Journal of Physics, 88(9), 704–710. https://doi.org/10.1119/10.0001388
Rae, W. J. (2003). Flight dynamics of an American football in a forward pass. Sports Engineering, 6(3), 149–163. https://doi.org/10.1007/BF02859892